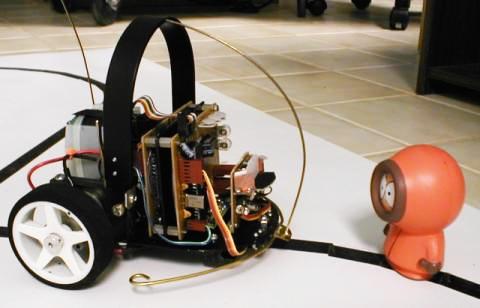
Here we see the ideal test subject for developing the hardware and software for robot obstacle avoidance behavior.