
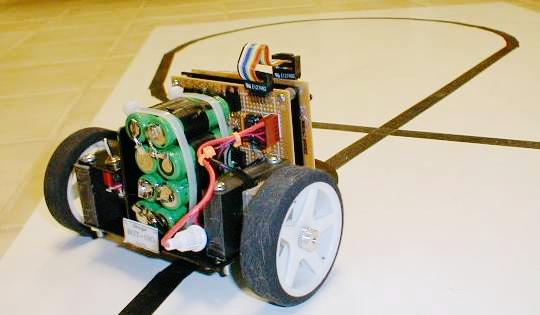
Note: Photograph taken before IR and bump sensors were installed.
This is a line follower robot I have been working on. It will travel the 202 inch long course (black tape on poster board) in 8.5 seconds. It ran the Atlanta Hobby Robot Club course in 6.93 seconds.
In September I added line finding and obstacle avoidance to the firmware and hardware. To find the 3/4 inch black line I added another set of CDS photo cells and LEDs between the rear wheels. This sensor generates an "S-Curve" (voltage over time) when the robot rolls over a line. This signature is detected with a primitive correlator in the firmware. Dark floor areas wider than about 2 inches are ignored.
The robot now has 3 bump switches to act as backup for the IR obstacle avoidance system. Click here to view a closeup of two of them and the line tracking sensor.
The robot can be turned loose in a room with the line following course and by randomly wandering around will eventually cross the line, backup to center the rear wheels on the line, then rotate until the front sensors are centered on the line at which time it begins tracking the line at full speed. The robot detects objects in it's path while line tracking and rotates 180 degrees to avoid hitting them.
I entered this robot in the AHRC 2000 Robot Rally Open Competition and won the 2nd place plaque .
Movie of Line Follower
( MPEG format 2.6 MB )
![]() More
Photographs of the Line Follower
More
Photographs of the Line Follower
 Movie of Line Follower
( Real Player format 320K )
Movie of Line Follower
( Real Player format 320K )

The links to the source code and schematics have been updated to reflect the changes I have made as of Oct 21 1999.
{kind=link}