 |
|

|
ROBOR Mini Sumo Robot by Dale Heatherington Aug 2001 |
|---|---|
|
ROBOR is a robot designed to compete in autonomous
mini sumo contests. ROBOR is bidirectional, capable of running
equally well in forward or reverse. Even his name is the same spelled backwards!
ROBOR is also an acronym for "Roll Opponent Bot Off Ring".
Construction time spanned 3 months and was quite educational. I improved my metal working skills, learned about sonar and programming subsumption architecture. Click here to see photos of the July 2001 mini sumo contest at the AHRC meeting. You may download a zip file with schematics and source code by clicking here . This information is not intended as instructions to duplicate Robor. In fact, it may be incomplete or erroneous. Use it at your own risk. |
|
| Data Sheet | |
|---|---|
| Size | 9.8cm(W) x 9.4cm(L) x 11.5cm(H) |
| Weight | 496 grams |
| CPU | Two PIC16F876-20/SP 8K ROM 368 Byte RAM |
| Programming Language | Assembler and C |
| Motors | Two Escap 280 RPM 12 v gear motors |
| Motor driver chip | L293D |
| Wheels | Four 1 inch diameter slot car tires |
| Drive system | 4WD with timing belts |
| Speed | 22 cm/sec |
| Pushing force | 360 grams (wheels spinning) |
| Power | Single lithium 9 volt battery |
| Current | 100 mA crusing, 290 mA pushing |
| Sensors | Four reflective IR sensors for edge detection
Custom 4 channel sonar to locate opponents Tilt sensor Fwd/Rev motion sensor (are we being pushed?) |
| Telemetry | Linx TXM-418-RM (9600 baud 418 MHZ) |
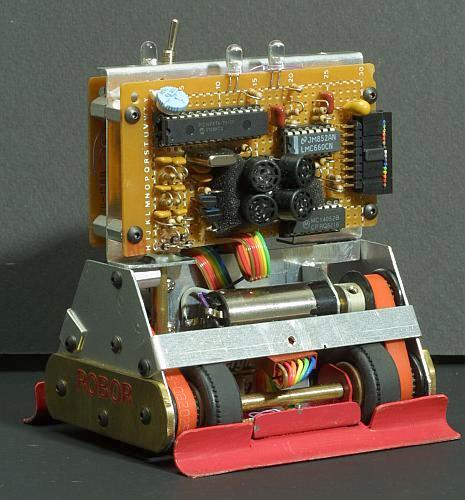
Front view, covers removed. Sonar sensor board visible. ROBORs sonar measures both distance and amplitude in four directions to determine the opponents location. The sonar code is written in assembler.
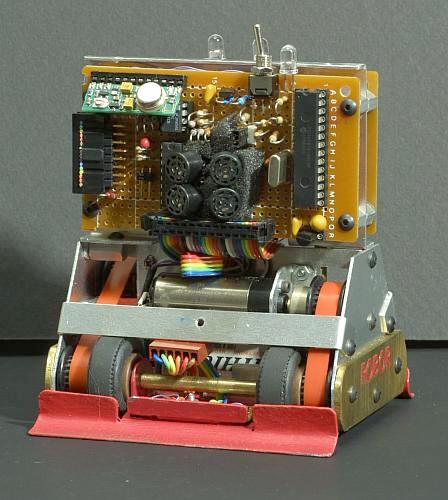
Rear view. Main controller board visible. Controller code is written in C. Small green board in upper left corner is a 418 mhz 9600 baud telemetry transmitter. White object between wheels is the 9 volt battery.

Bottom view. The protruding brass shaft is the tilt and movement sensor. In/out movement indicates tilt, rotation indicates direction of movement.
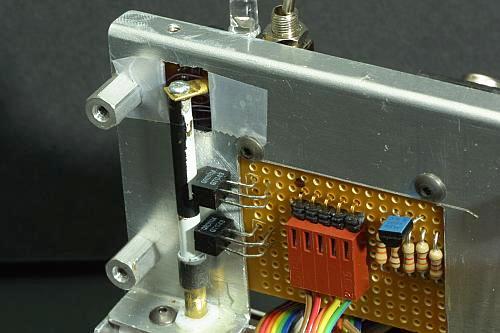
Closeup of the top end of the tilt/directon sensor rod. When rod drops down the black band is in front of the IR reflective sensor indicating tilt. Rod rotation brings the white or black half in front of the top IR sensor indicating forward or reverse motion. When software detects tilt or motion reversed from desired it activates an escape algorithm.
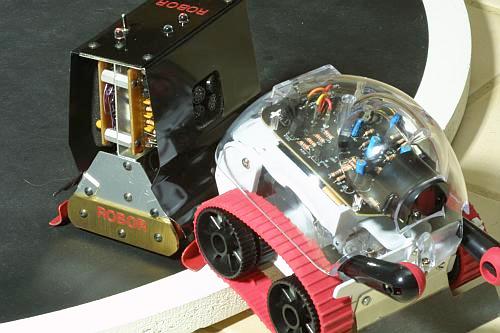
ROBOR is tested against the larger and heavier MOVIT OWI-9647 kit robot. ROBOR always wins.
|